

5G-EPICENTRE: Ultra-reliable drone navigation and remote control
![]()
Within the 5G-EPICENTRE project, HHI plans to test an important UC, which addresses the topic of PPDR. Among the most prominent cases of interest to the Wireless Communications and Networks department at Fraunhofer Institute for Telecommunications is the demonstration of super reliable drone navigation and remote control by utilising the federated testbed resources.
Drones have the potential to improve public safety, as they can, for example, be deployed to fly ahead of first responders and transmit live video of a particular situation at the site. This could be, for example, a fire on company premises. By flying ahead, the drone can clarify the emergency situation before first responders are able to reach the site. This saves extremely valuable time on the scene and improves planning of the mission, so that e.g., additional personnel can be alerted and deployed, if necessary.
Efficient drone control and localisation, however, remain challenging tasks, as drone communications should be characterised by stability, wide availability, low cost and ultra-reliability, even when the drone is out of sight. As modern drones are typically controlled via remote control, their applicability in real-life situations remains severely limited. In this UC, HHI will experiment with various methods for drone control in different situations, particularly focusing on network overload situations, when the data channels are used in major events or disasters.
A particularly efficient means of controlling drones via Bandwidth-optimised communication protocols in the mobile network will be deployed in the form of VNFs on top of the 5G-EPICENTRE infrastructure, facilitating a two-way communication where commands are transmitted to the device, which in turn responds with information about its position, altitude and battery status.
The mission drone will be using a 5G network slice in order to secure ultra-reliability and will be streaming Infrared (IR) and optical video streams of the site. The fire service is to receive a prioritised data link for the use of drones. Video and telemetry data should be able to be displayed on different devices at the same time.
The first step is to realise the CC link to the drone. This involves narrowband data with a high requirement for availability and latency. In the second step, the live video is to be transmitted via a separate VNF. The video has a high bandwidth requirement but lower latency and availability requirements than the CC link. Subsequently, the data from CC Link and Video should be able to be displayed in a common graphical user interface.
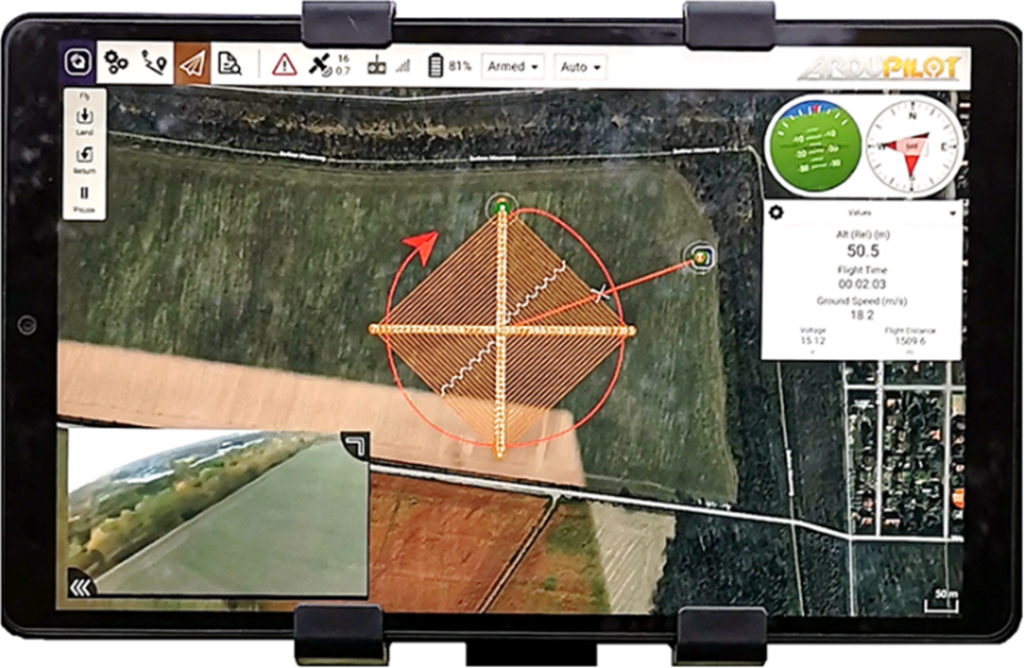
UC3 Ground Control app with integrated video
Experiment phases or deployment scenarios
The UC will demonstrate the use of a drone as part of a fire rescue service operation.
- The drone connects to the 5G testbed via 5G campus network connection using 100 MHz bandwidth at 3.7 GHz in band n78 for the transmission of telemetry and video data.
- Optionally, the drone can connect to a 5G slice within this band to ensure reliability for mission critical communications.
Scenario 1
The control centre launches the drone and sends it to the operation area. The emergency forces who arrive on the scene after the drone can access it and its video data via a tablet or other suitable UE on their way to the site to get an impression of the situation. In order to relieve the emergency services, the monitoring of the drone can be returned to the control centre at any time. The mission operation manager is in control of the drone and the video streams all the time, even on the way to the site.
Scenario 2
Optionally and additionally to scenario 1, another drone operator off-site is able to control the drone remotely from the mission control centre. In addition to the drone’s automatic flight operation, this gives the maximum control over the drone and helps to guide and advise first responders with regard to the site’s special conditions accordingly. This can make all the difference to save valuable time, even if only some crucial minutes, and, thereby, possibly save lives.
Use case main building blocks
The interaction of the individual components is shown in the figure below.
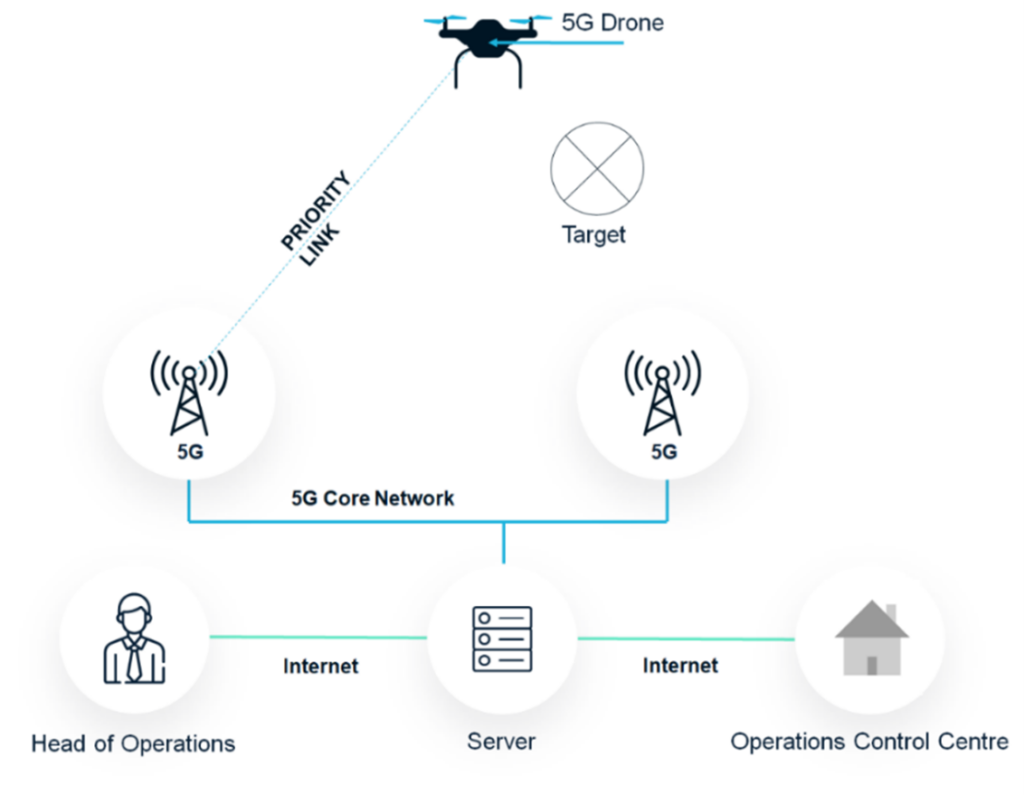
UC3 Interaction of the individual components (server equals management server)
The main building blocks consist of the drone with the dual camera and its 5G interface. The 5G network forms the node over which the entire communication runs. The processing of the data is done on an edge server. The access to the data and the control of the drone is done via Internet, the Server and the 5G Network as depicted in the UML diagram.
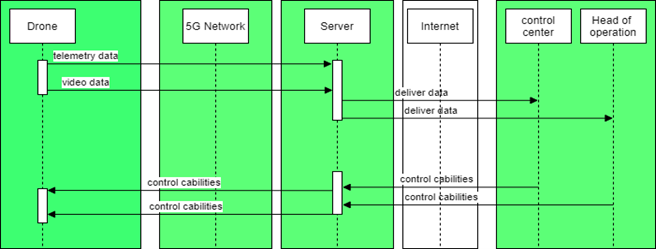
UC3 UML diagram
Sector:
Type of Experiment:

Global5G.org has published its White Paper entitled “How Europe can accelerate network densification for the 5G Era”.

Cloudscape Brazil 2019 aims to become the playground for EU-BR initiatives drving innovation in ICT through collaborative work between outstanding research institutes, large enterprises and SMEs.
© Copyright 2022 – 6GStart has received funding from the European Union’s Horizon Europe project call HORIZON-CL4-2021-DIGITAL-EMERGING-01 Grant agreement 101069987. The content of this website does not represent the opinion of the European Union, and the European Union is not responsible for any use that might be made of such content. Data protection declaration